刘思聪课题组成功举办Clawar2025技术研讨会Workshop on Advances in Soft Mobile Robots(软体移动机器人前沿技术研讨会)
2025年9月5日至9月7日,深圳技术大学组织的第28届攀爬和行走机器人国际会议(CLAWAR 2025)在深圳举办。本届大会设立的软体移动机器人分论坛在深圳技术大学C1-107会议室举办,南方科技大学刘吉、胡程志、王宏强、唐昭、万芳,中国科学院深圳先进技术研究院高兴,中山大学王萍等国内知名高校学者应邀作主题报告,南方科技大学机械与能源工程系系主任付成龙,哈尔滨工业大学(深圳)黄海林、冷雨泉,香港中文大学(深圳)孙正隆,深圳大学胡新尧和大湾区大学易娟等专家学者出席会议,李文贤教授与刘思聪副教授担任分会主席,刘思聪副教授主持会议。

刘思聪代表主办方致欢迎辞。他首先对各位专家学者的到来表示欢迎,并介绍了深圳技术大学近年来的发展情况。他指出,这次大会汇聚来自全球的顶尖学者、工程师及产业专家,共同围绕“AI赋能机器人运动与操作(AI Enabled Robotic Loco-Manipulation)”这一主题,展开深度交流与智慧碰撞,期待以本次大会为契机深化国际科研合作,并预祝大会取得圆满成功。

会议期间,胡程志等多位国内权威专家依次登台,分享最新研究成果与实践经验,为现场观众呈现了一场兼具深度与广度的学术盛宴。
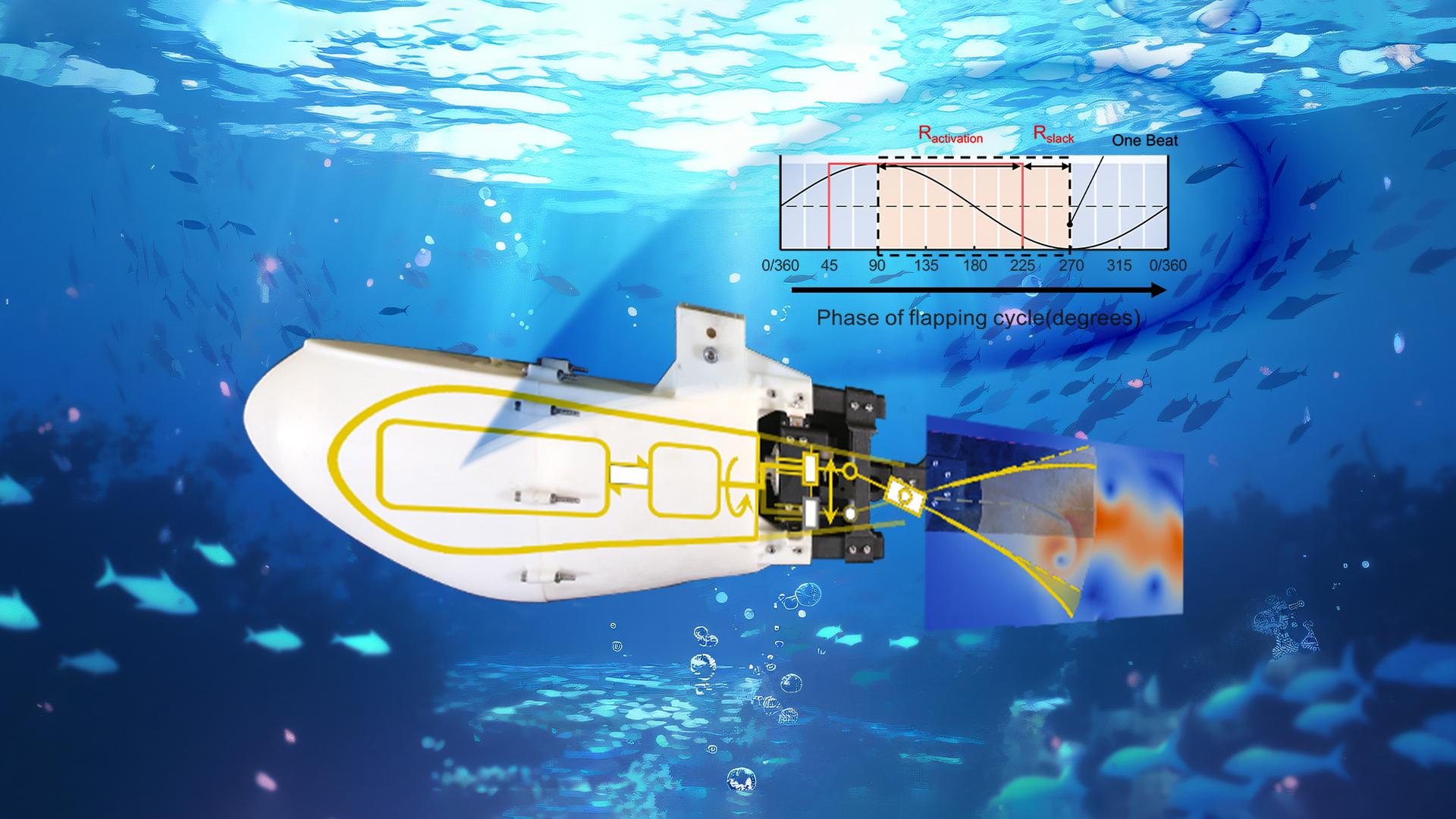
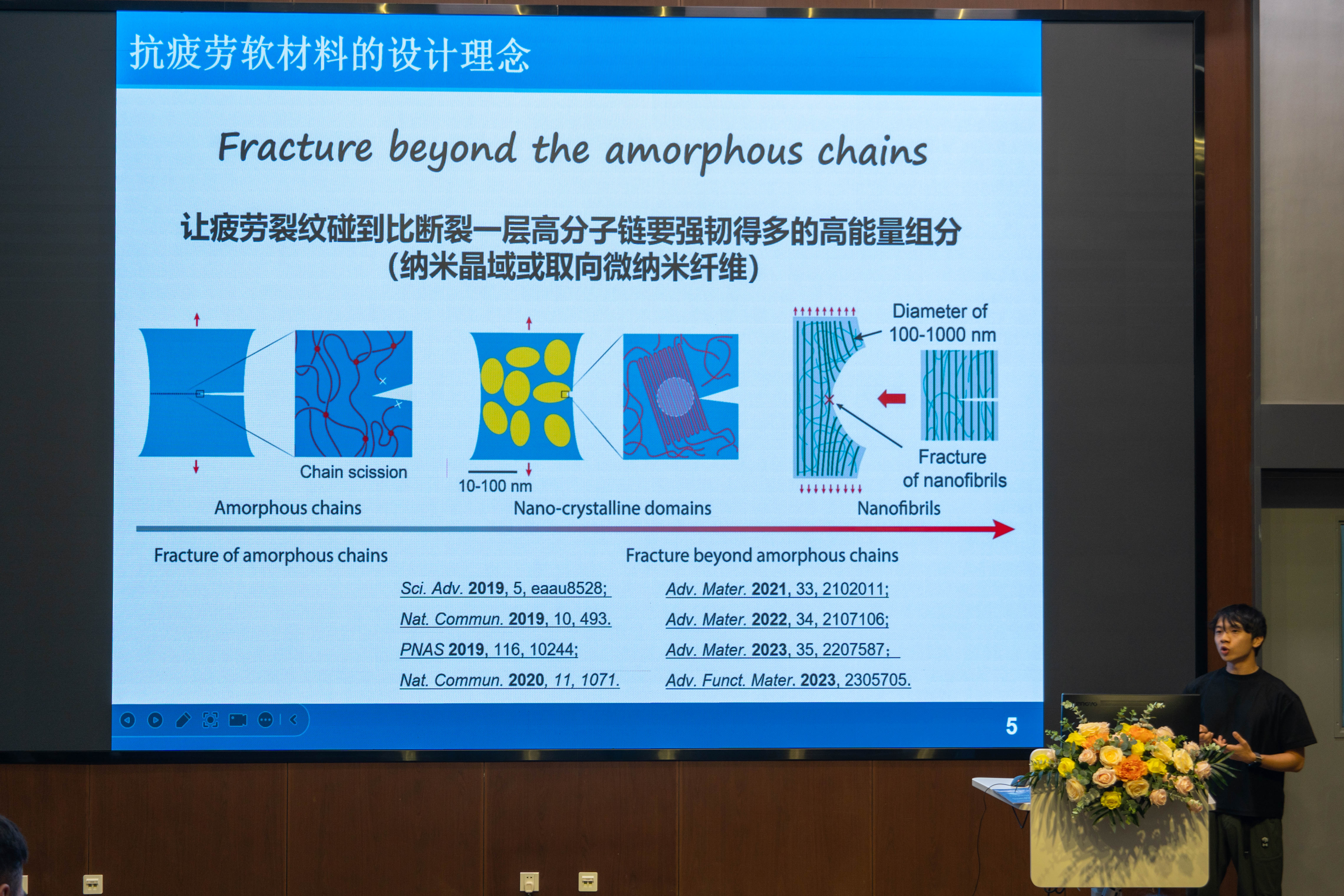
刘吉副教授作《FATIGUE- RESISTANT HYDRGOLS FOR UNDERWATER SOFT ROBOTICS》主题报告,介绍了包括基于动态化学键的超分子凝胶网络和软材料极限性能设计等方向的研究进展。
胡程志副教授作《MICRO/NANOROBOTICS FOR TUMOR DIAGNOSIS AND TARGETED THERAPY》主题报告,介绍了微纳米机器人及其在肿瘤靶向治疗等方面的技术研究进展。

王宏强副教授作《STUDIES ON ELECTROSTATIC ACTUATORS AND ITS APPLICATIONS TO ROBOTS》主题报告,介绍了静电柔性驱动的基础机理及其应用技术研究进展。

高兴副研究员作《A SINGLE CHAMBER MINIBOT WITH ELASTIC HINGES FOR ADAPTING TO VARIOUS DIAMETER PIPELINES》主题报告,介绍了电活性人工肌肉和智能材料等领域的研究进展。

王萍副教授作《EFFECTIVE SLIP AND TWIST CONTROL WITH CLOSE-LOOP TACTILE FEEDBACK FOR ROBOT MANIPULATION》主题报告,介绍了人机协同与智能机器人研发等,特别是在神经康复的下肢外骨骼系统方面取得了系列成果。

万芳助理教授作《PROPRIOCEPTIVE DESIGN AND LEARNING WITH SOFT POLYHEDRAL NETWORK》主题报告,介绍了力触觉智能的设计理论与学习技术,柔性交互设计和机器人学习等领域的研究进展。

唐昭研究助理教授作《PRINCIPLES OF METAMORPHOSIS AND STRUCTURAL EVOLUTION IN INTELLIGENT ROBOTICS》主题报告,介绍了可重构机构及仿生机器人研究进展,并展示了在变胞机器人开发及产业化应用方面取得的突出成果。
李文贤教授作会议总结,他首先对各位专家学者的莅临表示感谢,对各位专家学者的报告内容表示高度赞扬,他表示,这次大会提供了一个良好的交流平台,希望大家能进一步交流与合作。

与会期间,各位专家学者还实地参观了仿生机器人与折展智能实验室(Biorobotics and Foldable Intelligence Laboratory)。通过详细了解实验室的战略规划、科研布局与创新成果,专家们与课题成员进行愉快交流。

本次大会既汇聚全球顶尖智慧,又搭建起软体机器人技术创新的高端对话桥梁,为国内外软体机器人研究者提供了高水平的交流平台,有效促进了学科交叉与国际合作,为软体机器人科研与产业发展注入新活力。