https://doi.org/10.1109/LRA.2021.3131701
Abstract
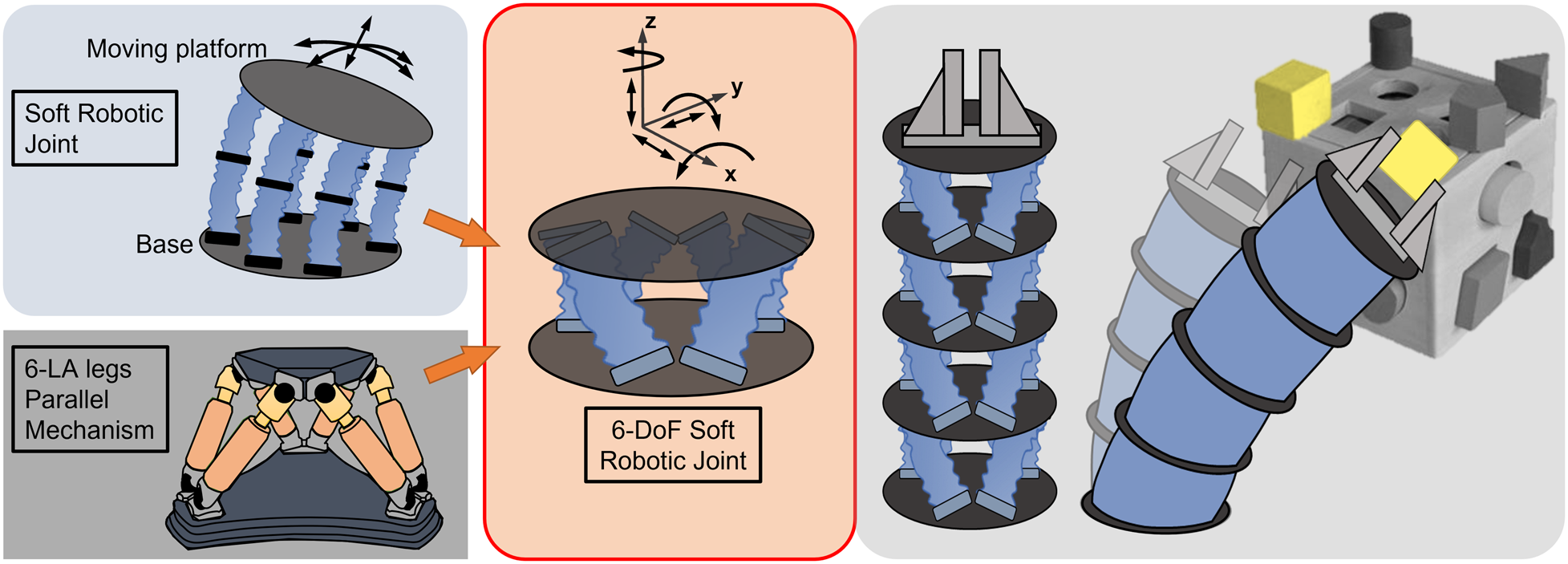
The soft robotic manipulators attract extensive interest of researchers due to its conformity to the unstructured environment, safe-interaction with human and fragile objects. The movement of the soft manipulator often include elongation, contraction, 2-DOF rotations due to the parallelly arranged fluidic-actuated linear soft actuators. Few design achieves bending and twisting around the longitudinal axis concurrently, thus hindering the implementation of such manipulator in scenarios requiring local position adjustment. Here, we proposed a soft robotic joint with a vertebra in the center of the tilt-arranged soft origami actuators, which enables twisting motion in addition to the rotation X and Y. Moreover, the tilted actuator configuration and the vertebra formed an antagonism pair, which endowed the soft joint with improved payload and stiffness variability. Due to the vertebra and the antagonism it provided, the joint prototype generated 22.6 N, 27.4 N force and 1.7 Nm torque in respective rotations with a light weight of 90.3 g; The resist force of the joint increased about 70% when inflated to 90 kPa; the RMSE between the actual and the desired output in a range of frequencies reduced considerably compared to the soft robotic joints without vertebra. A dedicated model was proposed and verified, obtaining the relationship between the input pressure and the output position/posture of the joint, providing a mapping model for the control loop.